sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
射出成形機からの部品ピッキング作業において、作業員の完璧な代替として、ロボットアームは今や射出成形システムに不可欠な要素となっています。しかし、市場には様々な種類のロボットアームが存在するため、お客様の射出成形機に最適なロボットアームをどのように選定すればよいのでしょうか?以下では、射出成形自動化システムにおけるロボットアーム選定の一般的な原則をまとめています。
ユニバーサルパラメータ
射出成形システムにおいて、射出ロボットアームの主な機能は、射出成形機から部品をピッキングすること、または射出成形機の外部から部品をピッキングして金型に挿入することです。そのためには、ロボットアームが十分な可搬重量を備え、部品ピッキング用のEOAT(電動アクチュエータ)を装着した状態で部品をロードし、適切な速度で安全に安定して搬送する必要があります。ロボットアームの可搬重量の許容範囲は、ロボットアーム自体の寿命と再現精度の延長に役立ちます。
ロボットの精度は、金型挿入、IMLラベリング、組み立て、部品研磨などの射出成形自動化を成功させる上で極めて重要です。金型挿入時に真鍮を扱うPVC/PPRパイプ継手射出成形システム用に設計されたSWITEKロボットアームは、追加のスライドユニットを備え、最大+0.1mmの再現性を確保するためにカスタムメイドされています。
射出ロボットアームのサイクルタイムは、射出成形システムのスループットを左右します。例えば、薄肉容器の製造向けに設計されたSWITEKの高速3軸サーボ射出ロボットアームは、乾燥サイクルタイムが約3.3秒、成形サイクルタイムが0.8秒未満と非常に短く、射出成形機の能力を無駄にしません。
情報技術の進歩に伴い、ますます多くのプラスチック工場が生産管理にMESシステムを導入しています。これにより、ロボットアームは従来のEU12/EU67またはJISインターフェースを介して射出成形機と通信できるだけでなく、MESシステムとのデータ交換に適したプロトコルを採用し、最新の射出成形自動化システムへの統合を容易にすることが求められます。
射出成形機または射出自動化システム用の射出ロボットアームを選択する際に重要なのは、ロボットアームが金型センターに到達して部品をピッキングし、コンベアまたは自動化システムの適切な位置に搬送してさらに加工できるようにすることです。射出成形機に応じた射出ロボットアームの到達範囲の定義について詳しくは、以下のリンクをご覧ください。
EOATは、吸盤やグリッパー、そしてロボットアームと連携して射出成形後の部品を金型から取り出し、次の工程に進めるためのサポート部品を備えた、最小限の自動化システムです。以下のリンクでは、最新のEOATの組み立て方法と、複雑なエンドオブアームツールの組み立てに使用される標準部品の詳細な紹介をご覧いただけます。
アームエンドツールとは何ですか? また、どのように組み立てられますか?
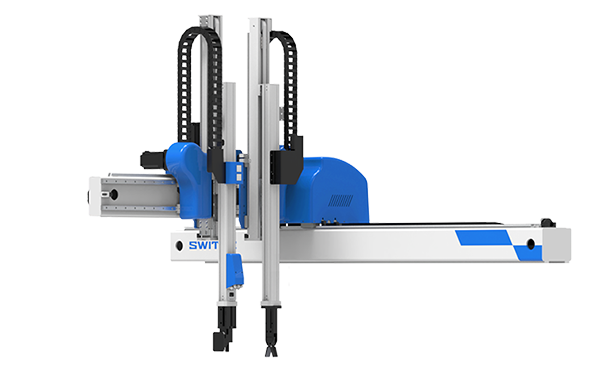
多少の違いはあるものの、射出成形機のサイズはそれほど変わらないため、上記のパラメータとクレーンの高さを考慮し、射出成形機の荷重範囲に応じて、射出成形機用に設計されたロボットアームを迅速に選定できます。例えば、3軸サーボ射出成形ロボットアームSW6710DSは、荷重範囲20,00kN~40,00kN、最大積載量8kgの射出成形機に適しています。
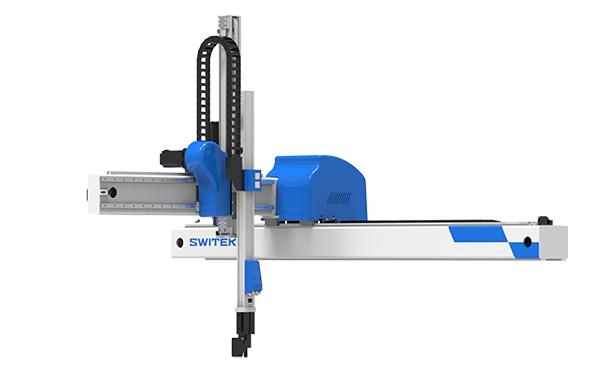
射出成形システムの生産量によって、投資回収のスピードが決まります。例えば、スナックボックスのピッキングに射出ロボットを選ぶ場合、2kgの可搬重量を誇る高速ロボットアームSW7112DSの方が、8kgの可搬重量を誇る標準ロボットSW6710DSよりもはるかに優れています。なぜなら、高速射出成形機の射出速度を捉え、生産量を最大化できるからです。
一部のプラスチック部品は、高度な射出成形金型を使用して特殊な材料から製造されており、部品を確実に取り出せるように、ロボットアームまたはアーム先端のツールに適切な変更が加えられます。
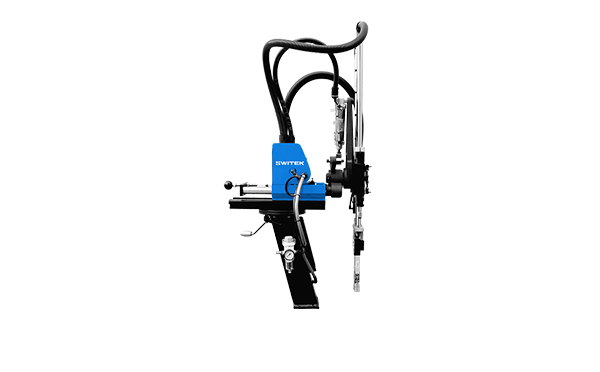
ほとんどの部品ピッキングには3軸サーボ射出成形ロボットアームが最適ですが、スタックモールドや3プレートモールドの設計では、射出成形システムにおいて部品ピッキングにはダブルアームロボットアームが重要になります。また、金型内挿入(IML)を行うプロジェクトでは、ダブルアームロボットアームによってシステム設計も容易になります。作業場の屋根の高さが十分でないなどの特殊な状況では、カスタムメイドのサイドエントリーロボットアームや6軸産業用ロボットアームも選択肢となります。
はい、どの上司にとってもロボットアームのコストは重要です。しかし、低価格のロボットアームは本当に低コストのロボットアームと言えるのでしょうか?残念ながら、ほとんどのプロジェクトではそうではありません。メンテナンスが容易な高価格のロボットアームの方が、費用対効果ははるかに高くなります。特に、高度な射出成形自動化システム用のロボットアームでは顕著です。
射出成形ロボットアームのサプライヤーを選ぶ際には、単にサプライヤーを選ぶだけでなく、プロジェクトに適したロボットブランドを選びながら、射出成形システムの生産性向上を継続的に支援してくれるパートナーも必要です。射出成形自動化システム向けロボットアームの経験豊富なサプライヤーは、部品生産の高度化、作業場の環境、そして射出成形機を分析した上で、最適なソリューションを提案します。経験豊富なロボットアームサプライヤーを選ぶことで、射出成形システムの生産性を継続的に向上させながら、生産コストを削減することができます。
上記は、射出成形自動化プロジェクトにおける射出成形ロボットアームの選定方法の簡単な概要です。射出成形ロボットアームの選定についてご質問がございましたら、下記のWeChat/WhatsAppからお気軽にお問い合わせください。私は、2017年9月4日より、射出成形自動化ソリューションの中国インテグレーターであるGuangDong SWITEK Technology Co., Ltd.で、射出成形用ロボットアームおよび自動化システムの営業を担当しています。
Email: sales06@switek.biz


Email: sales06@switek.biz
射出自動化ニュース&エクスプレス
SAMFACC自動化サイドエントリーIMLロボットが20Lバケットの生産に設置
Chinaplas 2024 -- UVIA が CHUANY IML ロボットを搭載した全電動射出成形機を展示
NPE 2024、ChenHsong MachineryがターンキーIMLソリューションを展示
LK、Kフェア2016でペール缶サイドエントリーIMLソリューションを搭載したFORZA 2プラテン射出成形機を展示
HAIDA ハイブリッド射出成形機 HD360DY 向け高性能 IML ロボット
GECH IML がチャイナプラス 2023 でビジョン コントロールを備えた 12 キャビティ ヨーグルト カップ サイド エントリー IML ソリューションを展示
住友 Onshow 新しい全電動射出成形機 Intellect S220 4 キャビティ蓋付き IML ソリューション
SAMFACC IML ロボット 20L バケット トップエントリー IML ソリューション
K-2022、Yizumiが高速全電動射出成形機PAC250Eを搭載したターンキーIMLソリューションを展示
NPE 2024 - ハイチが第5世代のJupiterシリーズ2プラテン射出成形機を展示
ブロガーに連絡する
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
私に従ってください





HuangYanZheng©Copy Right