
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
IMLロボットを再起動するたびに、ロボットアームの軸を原点位置に戻すことが非常に重要です。この章では、自動運転の前にIMLロボットの「ORG(原点復帰)」を行う方法を学びます。
ティーチペンダントの左上隅にあるノブを ORI に切り替えると、インターフェイスが原点画面にジャンプします。
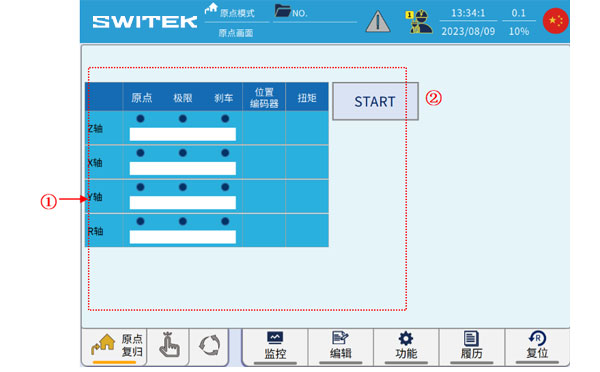
| いいえ | 名前 | 関数 |
|---|---|---|
| (1) | 軸データ |
|
| (2) | スタートキー | クリックすると、自動的に原点復帰アクションが開始されます。 |
原点ORGモードでは、STARTボタンを押して原点リセットを開始します。
Email: sales06@switek.biz


射出自動化ニュース&エクスプレス
SAMFACC IML ロボット 20L バケット トップエントリー IML ソリューション
住友 Onshow 新しい全電動射出成形機 Intellect S220 4 キャビティ蓋付き IML ソリューション
BORCHE、NPE 2024で660米トンの射出成形機を展示
NPE 2024 - WITTMANNが「IT's All WITTMANN」を実証するソリューションを展示
Chinaplas 2024 -- Yizumi はブース #4.1D32 で最先端の射出ソリューションを展示します
Chinaplas 2024 -- Lanson Machinery はブース #2.1F142 で新しい GE シリーズ全電動射出成形機を展示します
SWITEK の金属ラベル付き 6 キャビティ カップ用新 IML システムが大量生産に対応
Chinaplas 2024 -- BOLE Machinery がブース #4.1D24 で新しい全電動射出成形機を展示
HAIDA ハイブリッド射出成形機 HD360DY 向け高性能 IML ロボット
MULLER は 8 キャビティカップのターンキー IML ソリューションを提供します ビジョンコントロールを備えたサイドエントリー IML ソリューション
ブロガーに連絡する
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
私に従ってください





HuangYanZheng©Copy Right





