sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
「ティーチング」では、IMLロボットのプログラムを確認・編集できます。モジュール設計の制御システムであるため、モード選択、パラメータ設定、タイマー設定、カウンター設定を行うと、IMLプロジェクトの初期プログラムが作成されます。「ティーチング」ページでは、プログラムの微調整を行い、IMLロボットをより効率的に動作させることができます。
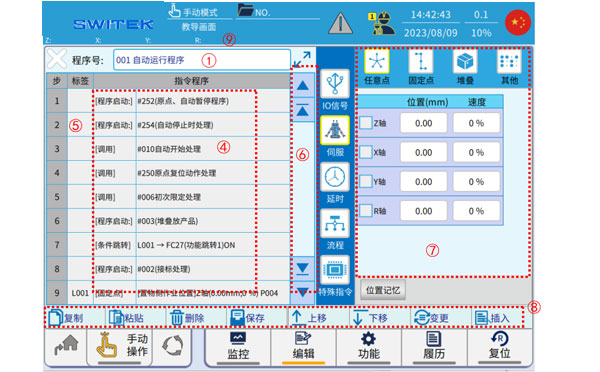
各マーキングエリアの説明:
| いいえ。 | 名前 | 関数 |
|---|---|---|
| (1) | プログラム選択/表示 | ポップアップの「プログラム リスト」をクリックし、追加、編集、または表示するプログラム番号を選択してクリックすると、編集インターフェイスに入ります。 |
| (2) | プログラム拡張表示 |  をクリックすると、プログラム表示の拡張インターフェースに入り、完全なコマンド内容を簡単に確認できます。 をクリックすると、プログラム表示の拡張インターフェースに入り、完全なコマンド内容を簡単に確認できます。 |
| (3) | 戻る | クリックするとチュートリアル編集インターフェイスを終了し、プログラムが変更されている場合はコンパイルを促します。 |
| (4) | 指導内容 | コマンドの内容が表示されます。 |
| (5) | ラベル列 | タブの編集領域に移動します。クリックするとコマンドラインの前にラベルが追加されます(新しいラベルを作成する際に、番号を入力せずに「EN」をクリックすると、未使用のラベル番号が自動的に追加されます)。 |
| (6) | 第一レベルの指示リスト |
|
| (7) | コマンドセカンダリリストとパラメータ設定 | サブリストコマンドの編集とパラメータ設定。 |
| (8) | コマンド編集ショートカット |
|
| (9) | 軸位置表示 | 各軸の現在の位置が表示され、簡単に確認できます。 |
IML ロボット プログラムを「教える」方法の詳細は以下をご覧ください。
プログラム名表示エリアをクリックするとプログラムリストに入ります。
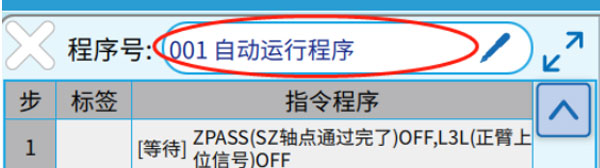
インターフェースは次のとおりです。
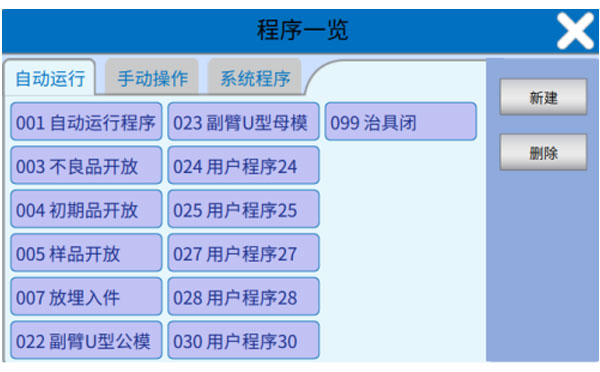
自動実行 (001-099): 001 はユーザーが編集できるメイン プログラム、024-083 はユーザーが作成および編集したサブルーチンです。
手動操作(#178-#249):
編集インターフェースは上図の通りで、新しいコマンドラインは次の 6 つのステップに分かれています。
以下は最もよく使用されるコマンドの一部です。
アプリケーションプログラミングを指導する際には、射出成形機とマニピュレータ(ここではIMLロボット)の標準的なIO制御における基本的なX点とY点のロジックをユーザーが編集することは推奨されません。プログラムの精度を確保するため、システムの関数サブルーチンを呼び出す必要があります。これらのサブルーチンは「IO信号」クラスに配置されます。
上図に示すように、プログラミング手順は1(大分類)、2(小分類)、3(特定指示)、4(特定パラメータ)に従って段階的に設定され、完了したら「変更」または「挿入」をクリックします。
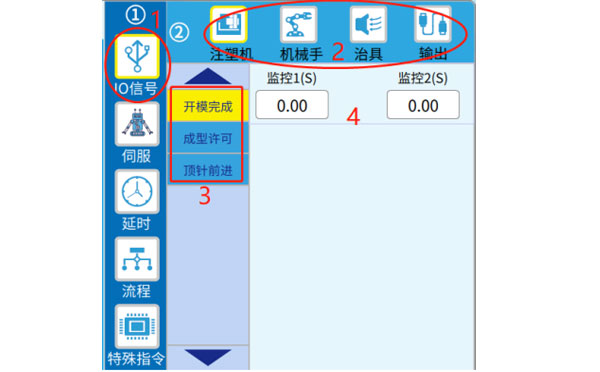
IMLロボット関連の便利機能を編集する際は、下図のボタンを使ってIMLロボット関連の治具を操作できます(右側のドットをオン/オフにすることで、センシング信号のオン/オフを確認できます)。  )、実際の動作シナリオでのシミュレーションをプログラムするのに便利です。
)、実際の動作シナリオでのシミュレーションをプログラムするのに便利です。

I/O ポイントの出力ロジックを編集するための編集インターフェイスは次のとおりです。
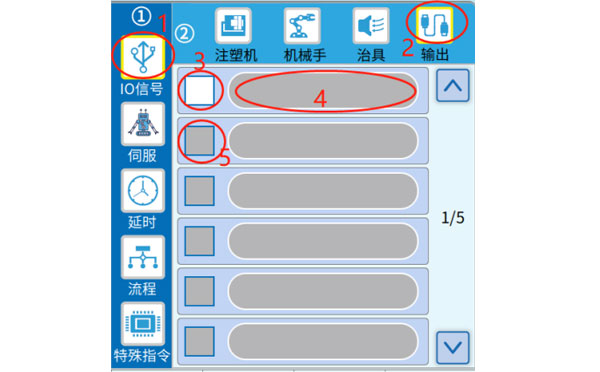
上図の編集インターフェースで、ラベル番号3の√をクリックすると、マーク4が編集可能になります。 出力するYポイントのONまたはOFFを選択して確定します。IMLロボットのYポイントを同時に出力したい場合は、指定子5で、 √をクリックして2番目のYポイントの出力編集を開始します。完了したら、「変更」または「挿入」をクリックします。
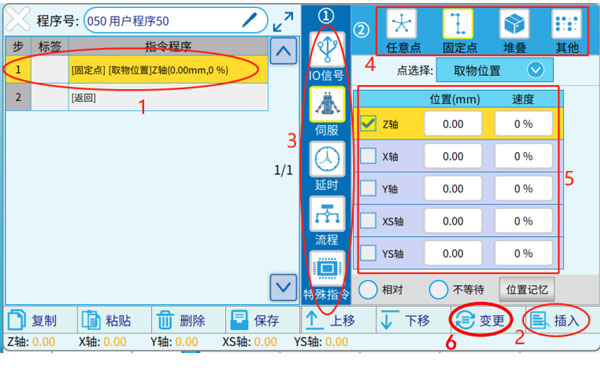
サーボ軸の移動コマンドを編集します。これには、固定点(ポイントは定義され、「位置設定」で変更でき、参照も可能)、任意のポイント、スタックポイント(位置はメニューの「スタック」で設定)、軸原点復帰コマンドなどへの移動が含まれます。固定点を例に挙げます。
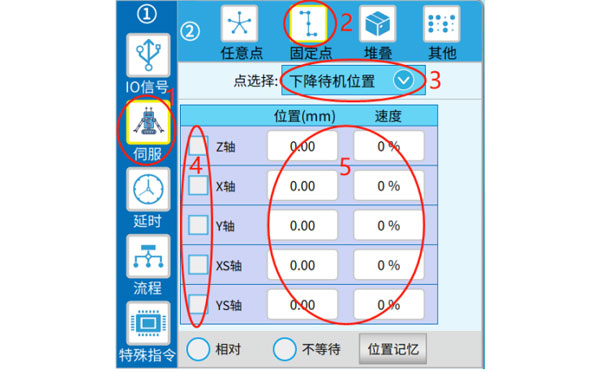
上の図のように、ラベル3で特定のポイントを選択し、ラベル4で実行する軸を選択し、ラベル5でポイントと速度を設定します。完了したら、「変更」または「挿入」をクリックします。
編集遅延コマンドには、時間を指定するものとタイマーを指定するものの 2 種類があります (タイマー時間は自動実行時に変更できます)。
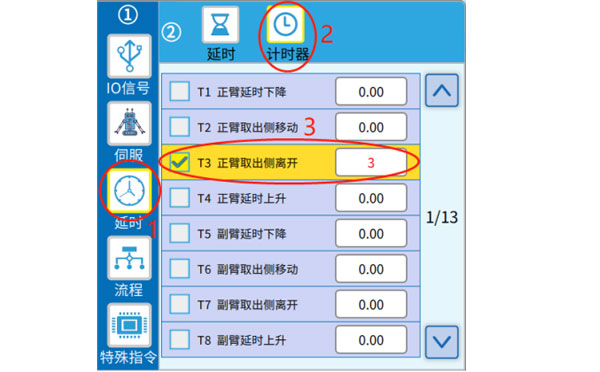
注: プログラミングを教える際にタイマーを使用する場合は、特に定義されていないユーザータイマーであるT85-T100をお勧めします。
呼び出しとプログラム起動はどちらもサブルーチンの使用方法です。違いは、サブルーチンが呼び出されると、サブルーチン内の命令の実行が終了するまで(「return」命令まで)待機し、呼び出しが完了したとみなされて、メインプログラムで次の命令を実行できる点です。一方、起動サブプログラムの実行を待つ必要がなく、メインプログラムの次のステップを直接開始できます(メインプログラムとサブプログラムは並列に実行されます)。
プログラムの起動コマンドを編集する手順は次のとおりです。
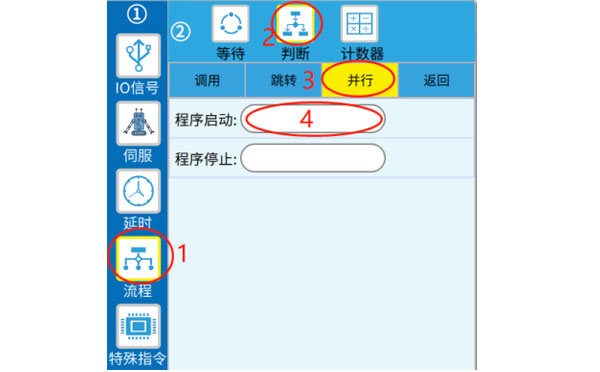
注: プログラムは開いているサブプログラムを開始します。このサブプログラムは上記の「プログラム停止」で閉じることができます(通常、サブプログラムは実行が完了し、「return」命令に到達した後、自動的に閉じられます)。
呼び出しコマンドを編集する手順は次のとおりです。
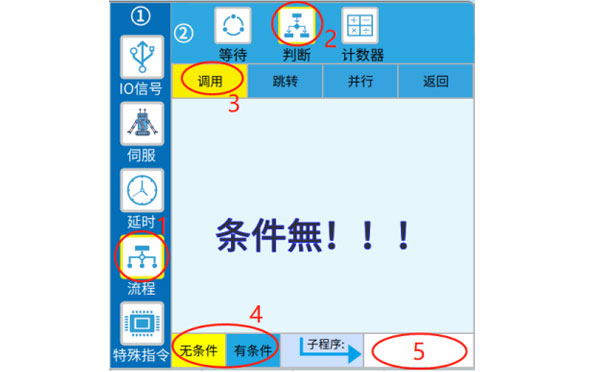
上記のアイコン4に示すように、呼び出し命令の編集時に条件を設定するかどうかを選択できます。「無条件」を選択した場合は、マーク5で呼び出すサブルーチン番号を設定することで呼び出しが完了します。「条件付き」を選択した場合は、まず条件設定を完了し、マーク6でプログラム番号を設定して「変更」または「挿入」をクリックします。
前の条件判断が真でない場合、後続の呼び出しは実行されませんが、次の行の命令が開始されることに注意してください。
ジャンプ コマンド: プログラムはジャンプ コマンドまで実行され、次のステップでは次の順序で実行されるのではなく、対応するタグが付いたコマンド ラインが実行されます。
ジャンプ/条件ジャンプの場合、コマンド編集手順は次のとおりです。

ラベル4に条件を設定するか、ラベル5に条件を設定するか(複数の条件を設定できます)、ラベル6にラベル番号を設定するかを選択し、「変更」または「挿入」を選択してコマンドを生成します。次に、対象のコマンドラインの前にあるラベル7に表示されているラベル列に入力します。
「条件付き」ジャンプが使用されている場合、前の条件判定は無効となり、後続のジャンプは実行されず、次の命令行が直接開始されます。条件が真の場合、ラベルにジャンプするコマンドラインを実行します。
内部フラグの出力はON/OFFになっており、編集手順は下のアイコン番号に示されています。
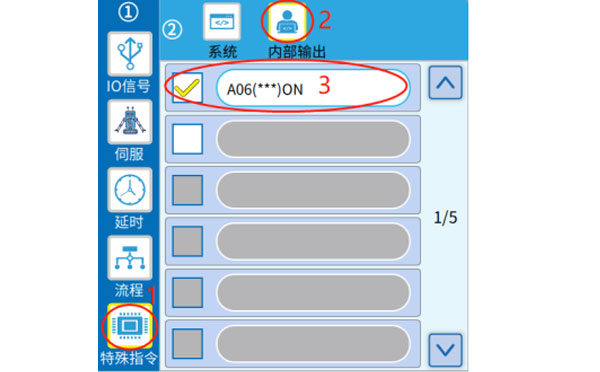
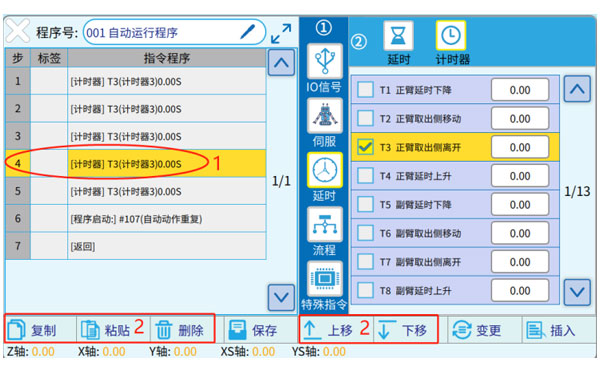
上記のアイコン番号 1 に示すように、編集するコマンドラインを選択し (黄色に変わります)、ラベル 2 のボタンを使用して操作を実行します。
各ボタンの機能は次のとおりです。
プログラムを編集したら、「保存」または「 」をクリックするか、他の設定ページに移動して「コンパイル」プロンプトを表示し、「はい」をクリックして編集が完了するまで待ちます(コンパイル後に自動的に保存されます)。
」をクリックするか、他の設定ページに移動して「コンパイル」プロンプトを表示し、「はい」をクリックして編集が完了するまで待ちます(コンパイル後に自動的に保存されます)。

ティーチペンダントの左上隅にある「know」を「AUTO」に切り替えて、自動操作インターフェースに入ります。ティーチング画面に移動し、 下図のように「 」アイコン(ラベル1)をクリックして、拡張表示画面に入ります。ラベル2の「Single step」をクリックしてシングルステップ状態に入り、ラベル3の  」ボタンを1回押すと、 プログラムが1ステップに進みます。
」ボタンを1回押すと、 プログラムが1ステップに進みます。
プログラムの進行状況は4番で確認できます。「プログラム番号」は実行中のプログラムの番号、「ステップ番号」は実行中のプログラムの番号です。

Email: sales06@switek.biz


射出自動化ニュース&エクスプレス
K-Fair 2022、FANUCが交鍵バイオプラスチック注射ソリューションを出展
YIZUMI、InterPlas Thailand 2024でハンドルアセンブリを備えた2キャビティIMLソリューションを展示
SWITEK、ターンキー 2 キャビティ蓋の社内テストを完了 IML Solutions
SWITEK のハンドル付きバケットアセンブリ用新型 IML システムが大量生産を開始
NPE 2024 -- ユーシンがMKAシリーズ大型ロボットを展示
Muller ターンキー 2 コンパートメント IML ヨーグルトコンテナ 6 キャビティ サイドエントリー IML ソリューション
Chinaplas 2023 での本社金型ショーケース 4 キャビティ蓋 IML 生産
JetEngineは2/4キャビティカップの側面がIML生産に入る新しいIMLソリューションを展示する
Arge Robotikは矩形バケット2キャビティ用の新型IMLロボットを展示
SWITEK 社のマルチキャビティコンテナ用新型 IML ロボットが社内テスト中
ブロガーに連絡する
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
私に従ってください





HuangYanZheng©Copy Right